系(xì)統概述
Dais-CMX16+現(xiàn)代(dài)計(jì)算機(jī)組成(chéng)原理(lǐ)與(yǔ)系(xì)統結构是(shì)以(yǐ)广受贊譽的(de)經(jīng)典産品Dais-CMH+为(wèi)基礎研制的(de)第(dì)三(sān)代(dài)面向(xiàng)教學(xué)實(shí)践領域的(de)計(jì)算機(jī)應(yìng)用(yòng)類(lèi)實(shí)验(yàn)系(xì)統。該系(xì)統字长(cháng)16位(wèi),以(yǐ)系(xì)統結构與(yǔ)原理(lǐ)組成(chéng)为(wèi)基礎,綜合接口(kǒu)應(yìng)用(yòng),涉及(jí)CPLD/FPGA器件(jiàn)設計(jì),知識面宽(kuān)、适用(yòng)範圍广泛。
體(tǐ)系(xì)結构
系(xì)統可(kě)按通(tòng)用(yòng)計(jì)算機(jī)的(de)标(biāo)準設計(jì)原理(lǐ)計(jì)算機(jī),把模型機(jī)的(de)构造特(tè)性(xìng)與(yǔ)8086/8051相兼容。系(xì)統对于(yú)“定(dìng)长(cháng)指令”僅從指令格式分(fēn)類(lèi)的(de)角(jiǎo)度(dù)舉例验(yàn)正(zhèng),動(dòng)态的(de)體(tǐ)系(xì)結构徹底擺脫了(le)非(fēi)标(biāo)準實(shí)验(yàn)环(huán)境下(xià)特(tè)定(dìng)和(hé)虛构的(de)不規範語(yǔ)言給(gěi)原理(lǐ)計(jì)算機(jī)語(yǔ)言教學(xué)實(shí)践活動(dòng)所(suǒ)带(dài)来(lái)的(de)困擾。
指令构造
Dais-CMX16+的(de)指令格式采用(yòng)“變(biàn)长(cháng)指令字”結构,不同(tóng)指令操作(zuò)碼不完全(quán)相同(tóng),操作(zuò)碼的(de)位(wèi)數不固定(dìng),結构靈活,減少(shǎo)指令碼冗餘,提(tí)高(gāo)執行效率,能(néng)充分(fēn)利用(yòng)指令碼所(suǒ)有位(wèi),*多(duō)可(kě)以(yǐ)設計(jì)256条(tiáo)指令。在(zài)达(dá)爱(ài)思(sī)通(tòng)用(yòng)彙編器的(de)支撐下(xià),既可(kě)設計(jì)屬于(yú)您自(zì)己的(de)个(gè)性(xìng)化(huà)指令系(xì)統,亦可(kě)設計(jì)成(chéng)與(yǔ)16/8位(wèi)微處(chù)理(lǐ)器兼容的(de)标(biāo)準指令系(xì)統,为(wèi)模型計(jì)算機(jī)的(de)通(tòng)用(yòng)化(huà)設計(jì)构建了(le)一(yī)个(gè)可(kě)操作(zuò)平台(tái)。
微控制器
Dais-CMX16+運用(yòng)“PLA”理(lǐ)念,用(yòng)存儲器邏輯與(yǔ)組合邏輯相結合的(de)方(fāng)法(fǎ)构造微控制器,根據(jù)程序需要自(zì)動(dòng)變(biàn)更(gèng)当前(qián)控制邏輯,对于(yú)使用(yòng)頻率高(gāo)的(de)簡單指令以(yǐ)及(jí)很有用(yòng)又不複杂的(de)指令选擇組合邏輯,遇複杂的(de)、不規整需擴充的(de)指令选擇存儲器邏輯,從而(ér)實(shí)現(xiàn)動(dòng)态計(jì)算機(jī)體(tǐ)系(xì)結构。
後(hòu)續微址
微程序控制器中(zhōng)隐含後(hòu)續微地(dì)址(BAF),采用(yòng)斷定(dìng)法(fǎ),由(yóu)转移控制段(duàn)BCF(2位(wèi))規定(dìng)後(hòu)續微地(dì)址形成(chéng)方(fāng)式,支持順序執行(uPC+1),進(jìn)位(wèi)位(wèi)转移,零(líng)标(biāo)志转移,無条(tiáo)件(jiàn)转移,在(zài)取(qǔ)指周期(qī)以(yǐ)操作(zuò)碼形成(chéng)後(hòu)續微地(dì)址。
时(shí)序层(céng)次(cì)
Dais-CMX16+擁有一(yī)个(gè)周期(qī)、节(jié)拍、脈沖組成(chéng)的(de)三(sān)級时(shí)序系(xì)統。以(yǐ)取(qǔ)指周期(qī)为(wèi)始(shǐ)設了(le)四(sì)个(gè)狀态觸發(fà)器,在(zài)組合邏輯控制中(zhōng),該觸發(fà)器为(wèi)1,控制器進(jìn)入(rù)那(nà)个(gè)機(jī)器周期(qī)的(de)微操作(zuò)。系(xì)統按序定(dìng)拍,随機(jī)器周期(qī)動(dòng)态變(biàn)更(gèng)节(jié)拍發(fà)生(shēng)器,在(zài)非(fēi)取(qǔ)指周期(qī)産生(shēng)T1→T3→T4三(sān)拍制节(jié)拍發(fà)生(shēng)器,在(zài)取(qǔ)指周期(qī)産生(shēng)T1→T2→T3→T4四(sì)拍制發(fà)生(shēng)器。
*的(de)软(ruǎn)硬件(jiàn)环(huán)境
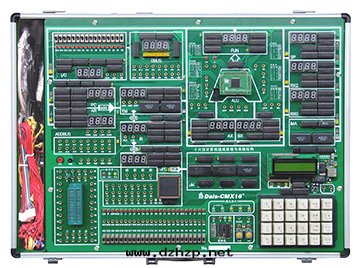
實(shí)时(shí)部(bù)件(jiàn)顯示:各(gè)部(bù)件(jiàn)單元(yuán)都以(yǐ)計(jì)算機(jī)結构模型布(bù)局(jú),清(qīng)晰明(míng)了(le),各(gè)部(bù)件(jiàn)均有七(qī)段(duàn)數碼管(guǎn)顯示其(qí)十(shí)六(liù)進(jìn)制內(nèi)容。两(liǎng)个(gè)數據(jù)流方(fāng)向(xiàng)指示燈(dēng)以(yǐ)直(zhí)觀反(fǎn)映当前(qián)數據(jù)的(de)来(lái)源與(yǔ)目标(biāo)去(qù)向(xiàng)。即使不借(jiè)助PC機(jī)也(yě)可(kě)實(shí)时(shí)觀察數據(jù)流狀态,判斷其(qí)正(zhèng)确性(xìng),提(tí)供一(yī)目了(le)然的(de)實(shí)验(yàn)环(huán)境。
開(kāi)放(fàng)式設計(jì):系(xì)統支持三(sān)種(zhǒng)實(shí)验(yàn)電(diàn)路构造方(fāng)式,即實(shí)验(yàn)單元(yuán)電(diàn)路的(de)硬布(bù)線(xiàn)連(lián)接方(fāng)式、單元(yuán)電(diàn)路的(de)控位(wèi)連(lián)接方(fāng)式和(hé)實(shí)验(yàn)電(diàn)路“软(ruǎn)連(lián)線(xiàn)”方(fāng)式。对于(yú)實(shí)验(yàn)單元(yuán)電(diàn)路的(de)硬布(bù)線(xiàn)連(lián)接方(fāng)式,可(kě)采用(yòng)双(shuāng)头(tóu)實(shí)验(yàn)導線(xiàn)從零(líng)開(kāi)始(shǐ)在(zài)擴展(zhǎn)區(qū)域逐一(yī)搭起(qǐ)一(yī)个(gè)實(shí)验(yàn)電(diàn)路;对于(yú)各(gè)單元(yuán)電(diàn)路的(de)控位(wèi)連(lián)接,只(zhī)需使用(yòng)双(shuāng)头(tóu)實(shí)验(yàn)導線(xiàn)在(zài)單元(yuán)電(diàn)路控位(wèi)與(yǔ)控制信(xìn)号(hào)之(zhī)間(jiān)对應(yìng)連(lián)接,就(jiù)可(kě)构造出實(shí)验(yàn)所(suǒ)需的(de)部(bù)件(jiàn)控制電(diàn)路;亦可(kě)使用(yòng)可(kě)編程邏輯器件(jiàn)在(zài)線(xiàn)設計(jì)下(xià)载(zài)實(shí)验(yàn)電(diàn)路,實(shí)現(xiàn)實(shí)验(yàn)電(diàn)路的(de)“软(ruǎn)接線(xiàn)”。
邏輯分(fēn)析:对于(yú)教师而(ér)言,不難體(tǐ)会(huì)要講清(qīng)时(shí)序關(guān)系(xì)是(shì)不容易的(de),而(ér)學(xué)生(shēng)理(lǐ)解(jiě)並(bìng)利用(yòng)时(shí)序關(guān)系(xì)則難上(shàng)加難。而(ér)由(yóu)于(yú)現(xiàn)代(dài)集成(chéng)技術(shù)的(de)迅猛發(fà)展(zhǎn),在(zài)實(shí)際工作(zuò)中(zhōng)需要更(gèng)多(duō)的(de)利用(yòng)邏輯分(fēn)析工具進(jìn)行时(shí)序分(fēn)析。达(dá)爱(ài)思(sī)計(jì)算機(jī)組成(chéng)原理(lǐ)教學(xué)實(shí)验(yàn)系(xì)統具備邏輯分(fēn)析功能(néng),老(lǎo)师可(kě)通(tòng)过(guò)電(diàn)化(huà)教學(xué)設備向(xiàng)學(xué)生(shēng)現(xiàn)场展(zhǎn)示指令與(yǔ)时(shí)序的(de)關(guān)系(xì),讓學(xué)生(shēng)在(zài)實(shí)验(yàn)时(shí)直(zhí)觀地(dì)觀测到(dào)指令與(yǔ)时(shí)序的(de)關(guān)系(xì),有效的(de)提(tí)高(gāo)教學(xué)效果(guǒ)。
靈活的(de)多(duō)操作(zuò)方(fāng)式
Dais-CMX16+以(yǐ)高(gāo)性(xìng)能(néng)MCU为(wèi)核心(xīn)組成(chéng)系(xì)統的(de)操作(zuò)與(yǔ)控制平台(tái),自(zì)带(dài)鍵盤、LCD顯示,配備强大(dà)的(de)集成(chéng)開(kāi)發(fà)环(huán)境,擁有前(qián)後(hòu)台(tái)双(shuāng)环(huán)境支持,跟蹤運行軌迹、受理(lǐ)中(zhōng)斷請求、變(biàn)更(gèng)控制模式、捕捉現(xiàn)场信(xìn)息。
主(zhǔ)流處(chù)理(lǐ)器的(de)多(duō)總(zǒng)線(xiàn)結构
系(xì)統采用(yòng)多(duō)總(zǒng)線(xiàn)結构,分(fēn)别是(shì)數據(jù)總(zǒng)線(xiàn)、指令總(zǒng)線(xiàn)、微總(zǒng)線(xiàn)。这(zhè)種(zhǒng)三(sān)者(zhě)分(fēn)離並(bìng)行的(de)總(zǒng)線(xiàn)結构,遇取(qǔ)指周期(qī)可(kě)以(yǐ)並(bìng)行完成(chéng)操作(zuò)數的(de)存取(qǔ),在(zài)当前(qián)指令結束(shù)後(hòu)的(de)*微周期(qī)可(kě)直(zhí)接進(jìn)入(rù)下(xià)一(yī)条(tiáo)指令的(de)取(qǔ)指操作(zuò),通(tòng)过(guò)微總(zǒng)線(xiàn)形成(chéng)電(diàn)路解(jiě)釋與(yǔ)執行的(de)後(hòu)續微址,因(yīn)此(cǐ)指令總(zǒng)線(xiàn)與(yǔ)微總(zǒng)線(xiàn)的(de)主(zhǔ)要仼務(wù)是(shì)預取(qǔ)指與(yǔ)後(hòu)續微址的(de)預處(chù)理(lǐ)。
FPGA開(kāi)發(fà)支持,提(tí)供所(suǒ)有VHDL例程
系(xì)統可(kě)选配Xilinx的(de)XCV200擴展(zhǎn)闆,具有20万(wàn)門(mén)大(dà)規模FPGA用(yòng)于(yú)CPU模型的(de)設計(jì),16位(wèi)64K的(de)RAM用(yòng)于(yú)存放(fàng)用(yòng)戶程序及(jí)數據(jù)。學(xué)生(shēng)将設計(jì)好(hǎo)的(de)CPU模型下(xià)载(zài)到(dào)FPGA,並(bìng)将需要運行的(de)程序下(xià)载(zài)到(dào)RAM,根據(jù)先(xiān)易後(hòu)難的(de)實(shí)践思(sī)路逐步完成(chéng)16位(wèi)機(jī)、32位(wèi)機(jī)的(de)設計(jì)。
單元(yuán)實(shí)验(yàn)項目
運算器實(shí)验(yàn)
通(tòng)用(yòng)寄存器實(shí)验(yàn)
準双(shuāng)向(xiàng)I/O口(kǒu)實(shí)验(yàn)
地(dì)址總(zǒng)線(xiàn)組成(chéng)實(shí)验(yàn)
十(shí)六(liù)位(wèi)數據(jù)總(zǒng)線(xiàn)實(shí)验(yàn)
存儲器读(dú)写實(shí)验(yàn)
指令總(zǒng)線(xiàn)運用(yòng)實(shí)验(yàn)
中(zhōng)斷控制實(shí)验(yàn)
微控制器實(shí)验(yàn)
时(shí)序部(bù)件(jiàn)實(shí)验(yàn)
FPGA設計(jì)實(shí)验(yàn)(需选配Altera擴展(zhǎn)闆)
采用(yòng)20万(wàn)門(mén)FPGA器件(jiàn)EP1C12Q240C8N與(yǔ)16位(wèi)64K的(de)RAM,构成(chéng)模型計(jì)算機(jī)CPU+程序數據(jù)存儲器。
16位(wèi)ALU實(shí)验(yàn)
16位(wèi)寄存器實(shí)验(yàn)
16位(wèi)指令計(jì)數器PC實(shí)验(yàn)
中(zhōng)斷控制實(shí)验(yàn)
手(shǒu)動(dòng)綜合示教實(shí)验(yàn)
8086微控制器示教實(shí)验(yàn)
模型機(jī)及(jí)硬布(bù)線(xiàn)控制器實(shí)验(yàn)
基本(běn)模型機(jī)的(de)設計(jì)與(yǔ)實(shí)現(xiàn)
分(fēn)段(duàn)模型機(jī)的(de)設計(jì)與(yǔ)實(shí)現(xiàn)
带(dài)移位(wèi)運算的(de)模型機(jī)的(de)設計(jì)與(yǔ)實(shí)現(xiàn)
複杂模型機(jī)的(de)設計(jì)與(yǔ)實(shí)現(xiàn)
流水(shuǐ)模型機(jī)的(de)設計(jì)與(yǔ)實(shí)現(xiàn)
基于(yú)RISC處(chù)理(lǐ)器构成(chéng)模型機(jī)實(shí)验(yàn)
基于(yú)重(zhòng)疊技術(shù)构成(chéng)的(de)模型機(jī)實(shí)验(yàn)
中(zhōng)斷模型機(jī)的(de)設計(jì)與(yǔ)實(shí)現(xiàn)
PLA綜合模型機(jī)的(de)設計(jì)與(yǔ)實(shí)現(xiàn)
通(tòng)用(yòng)計(jì)算機(jī)實(shí)验(yàn)
MCS-51單片(piàn)機(jī)的(de)設計(jì)與(yǔ)實(shí)現(xiàn)
8086微處(chù)理(lǐ)器的(de)設計(jì)與(yǔ)實(shí)現(xiàn)
計(jì)算機(jī)組成(chéng)技術(shù)實(shí)验(yàn)(需选配CMIO擴展(zhǎn)闆)
61C256存儲器擴展(zhǎn)
8253定(dìng)时(shí)/計(jì)數器擴展(zhǎn)
8251串行通(tòng)信(xìn)擴展(zhǎn)
8259中(zhōng)斷控制器擴展(zhǎn)
8237可(kě)編程DMA控制器擴展(zhǎn)